Fire & Smoke Detection
Overview
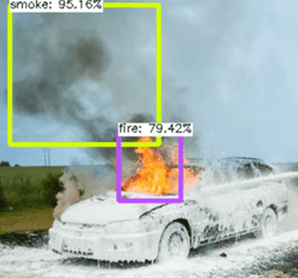
Fire & Smoke Detection node identifies fire and smoke regions in an input frame using a built-in detection model and returns bounding boxes with class labels.
Use this node to trigger safety alerts, activate suppression systems, or log events in surveillance and industrial monitoring flows.
Input
Input Image
image requiredThe image frame to analyze. Connect this to a camera or upstream image output.
Confidence Threshold
number requiredMinimum confidence score to keep a detection. See Confidence Threshold for tuning guidance.
Default: 0.5
Overlap threshold
number requiredBoxes overlapping Filter (higher allows more overlap). See Overlap threshold for tuning guidance.
Default: 0.3
Overlay Results
boolean requiredWhether to draw detection bounding boxes and labels on the output frame. See Overlay Results.
Model Directory Path
stringOptional path to a custom model directory. When left empty, the node uses the bundled fire and smoke detection model. See Model Directory Path for details.
Output
Overlay Image
imageOutput frame from the node. If overlays are enabled, detected fire and smoke regions are annotated with bounding boxes and labels.
Detected Count
integerNumber of fire or smoke regions detected in the current frame.
Detected Objects
arrayArray of detection objects. Each object contains:
bboxarray: Bounding box[x, y, width, height]in image pixel coordinates.labelstring: Detected class —fireorsmoke.confidencenumber: Detection confidence score.